�Լ� c t − 1 c_{t-1}ct−1 ����t֮ǰ���еĕr(sh��)�g��Ϣ��������ӛ����B(t��i)c cc��ConvLSTM�����L(zh��ng)��ӛ��������, ������Conv��(l��i)��t�r(sh��)�̵������c��֮ǰ��B(t��i)��һ��(g��)�\(y��n)��(d��ng)��Ϣ���������ھ��e�r(sh��)�ĸ���Ұ���^С������ConvLSTM̎������\(y��n)��(d��ng)���������ޣ����@��(hu��)��(d��o)���e(cu��)�`��Ϣ�IJ����������۷e��
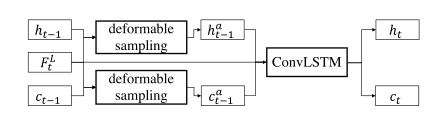
���˸���̎������\(y��n)��(d��ng)��ҕ�l���@ƪ������ConvLSTM��Ƕ���˿�׃�ξ��e���������ÿ�׃�ξ��e�քe��[ h t − 1 , F t L ] [h_{t-1},F^L_t][ht−1,FtL]��c t − 1 , F t L ] c_{t-1},F^L_t]ct−1,FtL]֮�g���\(y��n)����Ϣ����(sh��)�F(xi��n)�r(sh��)�g�ϵČ�(du��)�R���õ�[ h t − 1 a , c t − 1 a ] [h^a_{t-1},c^a_{t-1}][ht−1a,ct−1a] ,Ȼ��������ConvLSTM�^�m(x��)�M(j��n)�Еr(sh��)�g��Ϣ�ľۼ��������ںϣ������������^(gu��)�̵�ʾ��D������ʾ��
�D3 Ƕ���׃�ξ��e��ConvLSTM
ͬ�r(sh��)�����˸�������ȫ�ֵĕr(sh��)�g��Ϣ����(sh��)�H��ʹ�����p��Ŀ�׃�� ConvLSTM��Bidirectional Deformable ConvLSTM��,�����ں����^(gu��)ȥ��δ��(l��i)��Ϣ����������{ h t } t 2 n + 1 \{h_t\}^{2n+1}_t{ht}t2n+1��
2.3 ���ؽ�ģ�K
���ؽ�ģ�K�t��ʹ����һ��(g��)�r(sh��)�g�����ĺϳɾW(w��ng)�j(lu��)��ݔ�뮔(d��ng)��(g��)�r(sh��)�g�����[�ؠ�B(t��i)h t h_tht��Ȼ��ݔ����(du��)��(y��ng)��HR frame�����w��(l��i)�f(shu��)����ʹ����k 2 k_2k2��(g��)����K��ȡ���������Ϣ��Ȼ��ͨ�^(gu��)�����ؾ��e��sub-pixel��+PixelShuffle�ؽ���HR frames { I t t } t = 1 2 n + 1 \{I^t_t\}^{2n+1}_{t=1}{Itt}t=12n+1���ؽ��pʧ����(sh��)���£� l r e c = �O �O I G T t − I t H �O �O 2 + ϵ 2 l_{rec}=\sqrt {||I^GT_t-I^H_t||^2+\epsilon^2}lrec=�O�OIGTt−ItH�O�O2+ϵ2
ϵ 2 \epsilon^2ϵ2��һ��(g��)��(j��ng)�(y��n)ֵ���O(sh��)�Þ�1e-3�����˱��CӖ(x��n)���ķ�(w��n)���ԣ����J(r��n)�飺��(sh��)ֵ��(w��n)��---->Ӗ(x��n)����(w��n)����
�������Ķ��A�η�������VFI��VSR�е�SOTAģ�ͽM����ɣ�������(l��i)��Zooming Slow-Mo���u(p��ng)�����ϵı��F(xi��n)�����ã�����������һ�A��ģ�ͣ�ģ�͵ą���(sh��)�����^С���������ٶȱ�������ģ�Ͷ�Ҫ��öࡣ��TiTan XP Vid4�Ϝy(c��)ԇ��